license: openrail
base_model: runwayml/stable-diffusion-v1-5
tags:
- art
- controlnet
- stable-diffusion
- controlnet-v1-1
- image-to-image
duplicated_from: ControlNet-1-1-preview/control_v11p_sd15_depth
Controlnet - v1.1 - depth Version
Controlnet v1.1 is the successor model of Controlnet v1.0
and was released in lllyasviel/ControlNet-v1-1 by Lvmin Zhang.
This checkpoint is a conversion of the original checkpoint into diffusers format.
It can be used in combination with Stable Diffusion, such as runwayml/stable-diffusion-v1-5.
For more details, please also have a look at the 🧨 Diffusers docs.
ControlNet is a neural network structure to control diffusion models by adding extra conditions.

This checkpoint corresponds to the ControlNet conditioned on depth images.
Model Details
Introduction
Controlnet was proposed in Adding Conditional Control to Text-to-Image Diffusion Models by
Lvmin Zhang, Maneesh Agrawala.
The abstract reads as follows:
We present a neural network structure, ControlNet, to control pretrained large diffusion models to support additional input conditions.
The ControlNet learns task-specific conditions in an end-to-end way, and the learning is robust even when the training dataset is small (< 50k).
Moreover, training a ControlNet is as fast as fine-tuning a diffusion model, and the model can be trained on a personal devices.
Alternatively, if powerful computation clusters are available, the model can scale to large amounts (millions to billions) of data.
We report that large diffusion models like Stable Diffusion can be augmented with ControlNets to enable conditional inputs like edge maps, depthmentation maps, keypoints, etc.
This may enrich the methods to control large diffusion models and further facilitate related applications.
Example
It is recommended to use the checkpoint with Stable Diffusion v1-5 as the checkpoint
has been trained on it.
Experimentally, the checkpoint can be used with other diffusion models such as dreamboothed stable diffusion.
Note: If you want to process an image to create the auxiliary conditioning, external dependencies are required as shown below:
- Let's install
diffusers and related packages:
$ pip install diffusers transformers accelerate
- Run code:
import torch
import os
from huggingface_hub import HfApi
from pathlib import Path
from diffusers.utils import load_image
from PIL import Image
import numpy as np
from transformers import pipeline
from diffusers import (
ControlNetModel,
StableDiffusionControlNetPipeline,
UniPCMultistepScheduler,
)
checkpoint = "lllyasviel/control_v11p_sd15_depth"
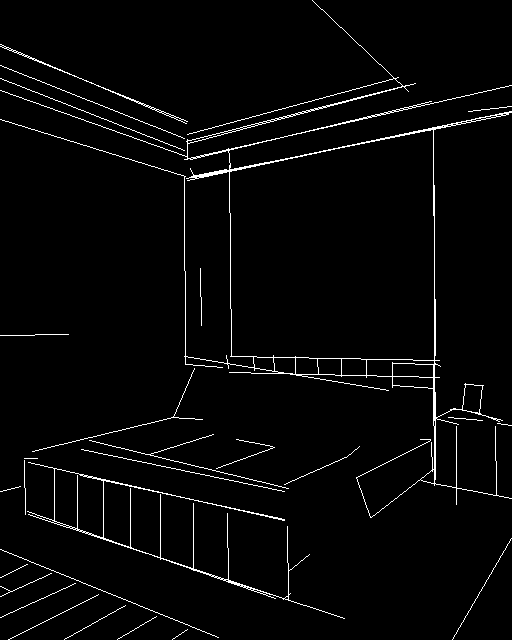
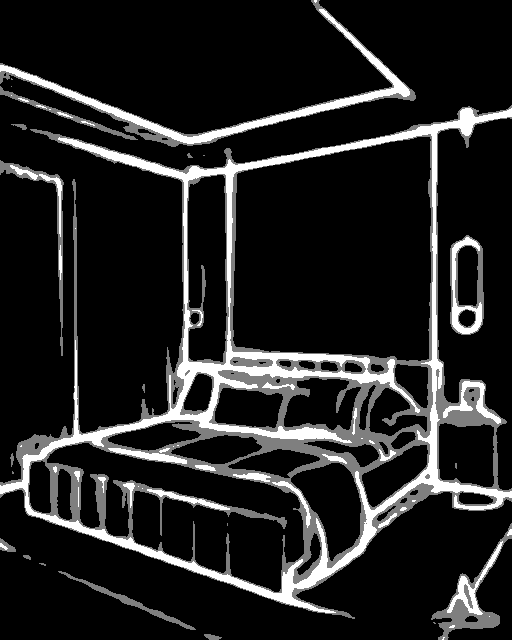
image = load_image(
"https://huggingface.co/lllyasviel/control_v11p_sd15_depth/resolve/main/images/input.png"
)
prompt = "Stormtrooper's lecture in beautiful lecture hall"
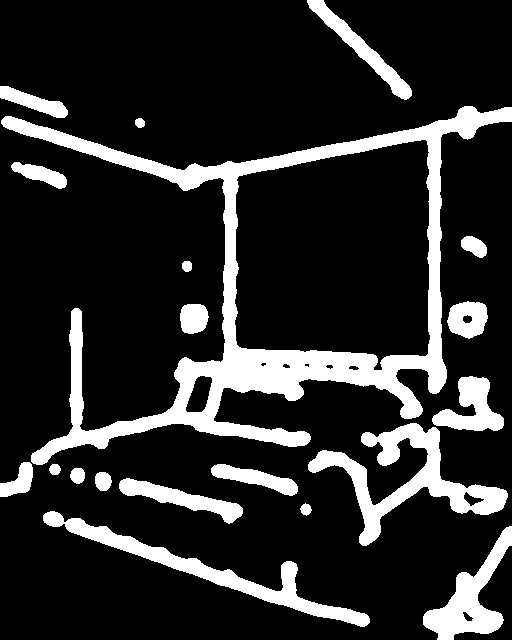
depth_estimator = pipeline('depth-estimation')
image = depth_estimator(image)['depth']
image = np.array(image)
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
control_image = Image.fromarray(image)
control_image.save("./images/control.png")
controlnet = ControlNetModel.from_pretrained(checkpoint, torch_dtype=torch.float16)
pipe = StableDiffusionControlNetPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5", controlnet=controlnet, torch_dtype=torch.float16
)
pipe.scheduler = UniPCMultistepScheduler.from_config(pipe.scheduler.config)
pipe.enable_model_cpu_offload()
generator = torch.manual_seed(0)
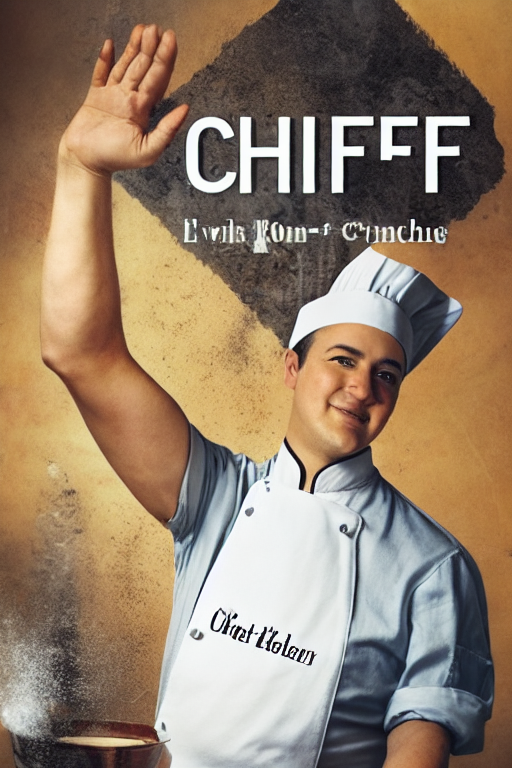
image = pipe(prompt, num_inference_steps=30, generator=generator, image=control_image).images[0]
image.save('images/image_out.png')



Other released checkpoints v1-1
The authors released 14 different checkpoints, each trained with Stable Diffusion v1-5
on a different type of conditioning:
Improvements in Depth 1.1:
- The training dataset of previous cnet 1.0 has several problems including (1) a small group of greyscale human images are duplicated thousands of times (!!), causing the previous model somewhat likely to generate grayscale human images; (2) some images has low quality, very blurry, or significant JPEG artifacts; (3) a small group of images has wrong paired prompts caused by a mistake in our data processing scripts. The new model fixed all problems of the training dataset and should be more reasonable in many cases.
- The new depth model is a relatively unbiased model. It is not trained with some specific type of depth by some specific depth estimation method. It is not over-fitted to one preprocessor. This means this model will work better with different depth estimation, different preprocessor resolutions, or even with real depth created by 3D engines.
- Some reasonable data augmentations are applied to training, like random left-right flipping.
- The model is resumed from depth 1.0, and it should work well in all cases where depth 1.0 works well. If not, please open an issue with image, and we will take a look at your case. Depth 1.1 works well in many failure cases of depth 1.0.
- If you use Midas depth (the "depth" in webui plugin) with 384 preprocessor resolution, the difference between depth 1.0 and 1.1 should be minimal. However, if you try other preprocessor resolutions or other preprocessors (like leres and zoe), the depth 1.1 is expected to be a bit better than 1.0.
More information
For more information, please also have a look at the Diffusers ControlNet Blog Post and have a look at the official docs.
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)