🚀 Poseless-3B
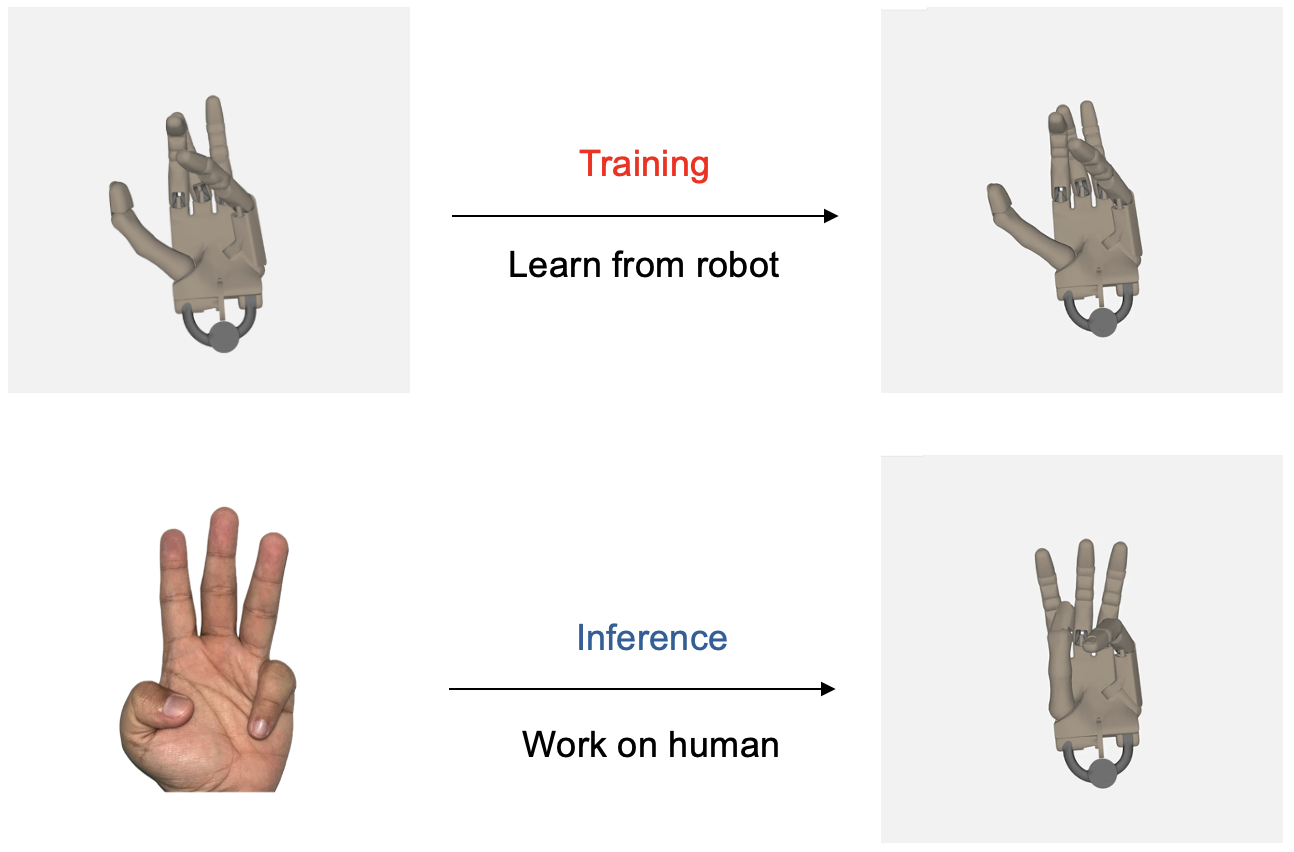
Poseless-3B 是一個用於機器人手部控制的模型,它通過直接將 2D 圖像映射到關節角度,避免了顯式的姿態估計。該模型利用合成訓練數據,實現了對現實場景的零樣本泛化以及從機器人手到人類手的跨形態遷移。
🚀 快速開始
以下是使用 Poseless-3B 模型進行手部姿態估計的示例代碼:
import torch
from PIL import Image
from transformers import AutoProcessor, Qwen2_5_VLForConditionalGeneration
from qwen_vl_utils import process_vision_info
device = "cuda" if torch.cuda.is_available() else "cpu"
model_path = "homebrewltd/Poseless-3B"
model = Qwen2_5_VLForConditionalGeneration.from_pretrained(
model_path,
trust_remote_code=True,
torch_dtype=torch.bfloat16
).eval().to(device)
processor = AutoProcessor.from_pretrained(
model_path,
min_pixels=256*28*28,
max_pixels=1280*28*28,
trust_remote_code=True
)
image = Image.open("your_hand_image.png").convert("RGB")
SYSTEM_PROMPT = """You are a specialized Vision Language Model designed to accurately estimate joint angles from hand pose images. Your task is to analyze images of a human or robotic hand and output precise angle measurements for each joint. Output joint angles in radians.
Output Format:
<lh_WRJ2>angle</lh_WRJ2><lh_WRJ1>angle</lh_WRJ1><lh_FFJ4>angle</lh_FFJ4><lh_FFJ3>angle</lh_FFJ3><lh_FFJ2>angle</lh_FFJ2><lh_FFJ1>angle</lh_FFJ1><lh_MFJ4>angle</lh_MFJ4><lh_MFJ3>angle</lh_MFJ3><lh_MFJ2>angle</lh_MFJ2><lh_MFJ1>angle</lh_MFJ1><lh_RFJ4>angle</lh_RFJ4><lh_RFJ3>angle</lh_RFJ3><lh_RFJ2>angle</lh_RFJ2><lh_RFJ1>angle</lh_RFJ1><lh_LFJ5>angle</lh_LFJ5><lh_LFJ4>angle</lh_LFJ4><lh_LFJ3>angle</lh_LFJ3><lh_LFJ2>angle</lh_LFJ2><lh_LFJ1>angle</lh_LFJ1><lh_THJ5>angle</lh_THJ5><lh_THJ4>angle</lh_THJ4><lh_THJ3>angle</lh_THJ3><lh_THJ2>angle</lh_THJ2><lh_THJ1>angle</lh_THJ1>
"""
messages = [
{"role": "system", "content": f"{SYSTEM_PROMPT}"},
{
"role": "user",
"content": [
{
"type": "image",
"image": image,
"min_pixels": 1003520,
"max_pixels": 1003520,
},
{"type": "text", "text": "<Pose>"},
],
},
]
text = processor.apply_chat_template(messages, tokenize=False, add_generation_prompt=True)
image_inputs, video_inputs = process_vision_info(messages)
inputs = processor(text=[text], images=image_inputs, videos=video_inputs, padding=True, return_tensors="pt").to(device)
generated_ids = model.generate(**inputs, max_new_tokens=1024)
generated_ids_trimmed = [out_ids[len(in_ids):] for in_ids, out_ids in zip(inputs.input_ids, generated_ids)]
output_text = processor.batch_decode(generated_ids_trimmed, skip_special_tokens=True, clean_up_tokenization_spaces=False)[0]
print(output_text)
輸出將是以 XML 格式表示的弧度制關節角度:
<lh_WRJ2>angle</lh_WRJ2><lh_WRJ1>angle</lh_WRJ1><lh_FFJ4>angle</lh_FFJ4>...
✨ 主要特性
- 創新框架:利用 VLM(如 Qwen 2.5 3B Instruct)直接將單目圖像映射到機器人關節角度,完全繞過姿態估計。VLM 能夠“觀察”和投影圖像,實現了強大的、與形態無關的特徵提取,減少了兩階段管道中固有的誤差傳播。
- 合成數據管道:通過隨機化關節角度和對視覺特徵(如光照、紋理)進行域隨機化,生成無限的訓練示例。這消除了對昂貴的標記數據集的依賴,同時確保了對現實世界變化的魯棒性。
- 跨形態泛化:模型展示了跨形態泛化能力,儘管僅在機器人手部數據上進行訓練,但仍能模仿人類手部動作。這些發現為更廣泛的應用理解和利用這種泛化能力邁出了重要一步。
- 無深度控制:證明了無深度控制是可行的,為後續採用不支持深度估計能力的相機鋪平了道路,而這種相機在機器人研究中經常使用。
📚 詳細文檔
模型詳情
論文引用
更多信息
如需進一步瞭解,請通過以下郵箱聯繫作者:alan@menlo.ai, bach@menlo.ai, charles@menlo.ai, yuuki@menlo.ai。
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
 Safetensors
Safetensors Transformers 支持多種語言
Transformers 支持多種語言