%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
模型概述
模型特點
模型能力
使用案例
🚀 RT-DETR模型卡
RT-DETR是一種即時端到端目標檢測模型,解決了現有目標檢測框架在速度和準確性上的困境。它結合了DETR的優勢,通過高效混合編碼器和不確定性最小查詢選擇,在保持速度的同時提高了準確性,適用於多種即時目標檢測場景。
🚀 快速開始
使用以下代碼開始使用該模型:
import torch
import requests
from PIL import Image
from transformers import RTDetrForObjectDetection, RTDetrImageProcessor
url = 'http://images.cocodataset.org/val2017/000000039769.jpg'
image = Image.open(requests.get(url, stream=True).raw)
image_processor = RTDetrImageProcessor.from_pretrained("PekingU/rtdetr_r50vd")
model = RTDetrForObjectDetection.from_pretrained("PekingU/rtdetr_r50vd")
inputs = image_processor(images=image, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
results = image_processor.post_process_object_detection(outputs, target_sizes=torch.tensor([image.size[::-1]]), threshold=0.3)
for result in results:
for score, label_id, box in zip(result["scores"], result["labels"], result["boxes"]):
score, label = score.item(), label_id.item()
box = [round(i, 2) for i in box.tolist()]
print(f"{model.config.id2label[label]}: {score:.2f} {box}")
此代碼應輸出:
sofa: 0.97 [0.14, 0.38, 640.13, 476.21]
cat: 0.96 [343.38, 24.28, 640.14, 371.5]
cat: 0.96 [13.23, 54.18, 318.98, 472.22]
remote: 0.95 [40.11, 73.44, 175.96, 118.48]
remote: 0.92 [333.73, 76.58, 369.97, 186.99]
✨ 主要特性
- 即時端到端檢測:RT-DETR是首個即時端到端目標檢測器,解決了YOLO系列中NMS對速度和準確性的負面影響,以及基於Transformer的檢測器(DETRs)計算成本高的問題。
- 高效混合編碼器:通過解耦尺度內交互和跨尺度融合,設計了高效混合編碼器,可快速處理多尺度特徵,提高檢測速度。
- 不確定性最小查詢選擇:提出了不確定性最小查詢選擇方法,為解碼器提供高質量的初始查詢,從而提高檢測準確性。
- 靈活的速度調整:支持通過調整解碼器層數來靈活調整速度,以適應各種場景,無需重新訓練。
- 高性能表現:在COCO數據集上,RT-DETR-R50 / R101達到了53.1% / 54.3%的平均精度(AP),在T4 GPU上達到了108 / 74 FPS,在速度和準確性上均優於先前先進的YOLO模型。

📦 安裝指南
文檔未提及安裝步驟,跳過該章節。
💻 使用示例
基礎用法
import torch
import requests
from PIL import Image
from transformers import RTDetrForObjectDetection, RTDetrImageProcessor
url = 'http://images.cocodataset.org/val2017/000000039769.jpg'
image = Image.open(requests.get(url, stream=True).raw)
image_processor = RTDetrImageProcessor.from_pretrained("PekingU/rtdetr_r50vd")
model = RTDetrForObjectDetection.from_pretrained("PekingU/rtdetr_r50vd")
inputs = image_processor(images=image, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
results = image_processor.post_process_object_detection(outputs, target_sizes=torch.tensor([image.size[::-1]]), threshold=0.3)
for result in results:
for score, label_id, box in zip(result["scores"], result["labels"], result["boxes"]):
score, label = score.item(), label_id.item()
box = [round(i, 2) for i in box.tolist()]
print(f"{model.config.id2label[label]}: {score:.2f} {box}")
高級用法
文檔未提及高級用法代碼示例,跳過該部分。
📚 詳細文檔
模型詳情
YOLO系列由於在速度和準確性之間進行了合理的權衡,已成為即時目標檢測中最流行的框架。然而,我們觀察到YOLO的速度和準確性受到非極大值抑制(NMS)的負面影響。最近,基於端到端Transformer的檢測器(DETRs)提供了一種消除NMS的替代方案。然而,高計算成本限制了它們的實用性,並阻礙了它們充分發揮排除NMS的優勢。
在本文中,我們提出了即時檢測Transformer(RT-DETR),據我們所知,這是第一個解決上述困境的即時端到端目標檢測器。我們分兩步構建RT-DETR,借鑑了先進的DETR:首先,我們專注於在提高速度的同時保持準確性,然後在保持速度的同時提高準確性。具體來說,我們設計了一個高效的混合編碼器,通過解耦尺度內交互和跨尺度融合來快速處理多尺度特徵,以提高速度。然後,我們提出了不確定性最小查詢選擇方法,為解碼器提供高質量的初始查詢,從而提高準確性。此外,RT-DETR支持通過調整解碼器層數來靈活調整速度,以適應各種場景,無需重新訓練。
我們的RT-DETR-R50 / R101在COCO數據集上達到了53.1% / 54.3%的平均精度(AP),在T4 GPU上達到了108 / 74 FPS,在速度和準確性上均優於先前先進的YOLO模型。我們還開發了縮放版的RT-DETR,其性能優於較輕量級的YOLO檢測器(S和M模型)。此外,RT-DETR-R50在準確性上比DINO-R50高2.2% AP,在FPS上約高21倍。在使用Objects365進行預訓練後,RT-DETR-R50 / R101達到了55.3% / 56.2%的AP。項目頁面:https URL。
模型來源
- HF文檔:RT-DETR
- 代碼倉庫:https://github.com/lyuwenyu/RT-DETR
- 論文:https://arxiv.org/abs/2304.08069
- 演示:RT-DETR Tracking
訓練詳情
訓練數據
RTDETR模型在COCO 2017目標檢測數據集上進行訓練,該數據集分別包含118k/5k張用於訓練/驗證的標註圖像。
訓練過程
我們在COCO和Objects365數據集上進行實驗,其中RT-DETR在COCO train2017數據集上進行訓練,並在COCO val2017數據集上進行驗證。我們報告了標準的COCO指標,包括平均精度(AP,在0.50 - 0.95的均勻採樣IoU閾值範圍內平均,步長為0.05)、AP50、AP75,以及不同尺度下的AP:AP-s、AP-m、AP-l。
預處理
圖像被調整為640x640像素,並使用image_mean=[0.485, 0.456, 0.406]和image_std=[0.229, 0.224, 0.225]進行重新縮放。
訓練超參數
訓練機制相關信息以圖片形式展示:

評估
| 模型 | 訓練輪數 | 參數數量(M) | 浮點運算數(GFLOPs) | 幀率(FPS_bs=1) | 平均精度(AP,驗證集) | AP50(驗證集) | AP75(驗證集) | AP-s(驗證集) | AP-m(驗證集) | AP-l(驗證集) |
|---|---|---|---|---|---|---|---|---|---|---|
| RT-DETR-R18 | 72 | 20 | 60.7 | 217 | 46.5 | 63.8 | 50.4 | 28.4 | 49.8 | 63.0 |
| RT-DETR-R34 | 72 | 31 | 91.0 | 172 | 48.5 | 66.2 | 52.3 | 30.2 | 51.9 | 66.2 |
| RT-DETR R50 | 72 | 42 | 136 | 108 | 53.1 | 71.3 | 57.7 | 34.8 | 58.0 | 70.0 |
| RT-DETR R101 | 72 | 76 | 259 | 74 | 54.3 | 72.7 | 58.6 | 36.0 | 58.8 | 72.1 |
| RT-DETR-R18(Objects 365預訓練) | 60 | 20 | 61 | 217 | 49.2 | 66.6 | 53.5 | 33.2 | 52.3 | 64.8 |
| RT-DETR-R50(Objects 365預訓練) | 24 | 42 | 136 | 108 | 55.3 | 73.4 | 60.1 | 37.9 | 59.9 | 71.8 |
| RT-DETR-R101(Objects 365預訓練) | 24 | 76 | 259 | 74 | 56.2 | 74.6 | 61.3 | 38.3 | 60.5 | 73.5 |
模型架構和目標
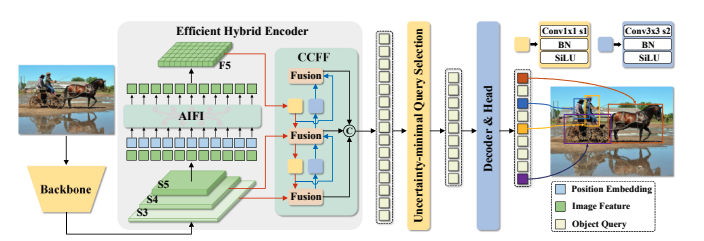
RT-DETR概述:我們將骨幹網絡最後三個階段的特徵輸入到編碼器中。高效混合編碼器通過基於注意力的尺度內特徵交互(AIFI)和基於卷積神經網絡的跨尺度特徵融合(CCFF)將多尺度特徵轉換為圖像特徵序列。然後,不確定性最小查詢選擇選擇固定數量的編碼器特徵作為解碼器的初始對象查詢。最後,帶有輔助預測頭的解碼器迭代優化對象查詢,以生成類別和邊界框。
引用
BibTeX:
@misc{lv2023detrs,
title={DETRs Beat YOLOs on Real-time Object Detection},
author={Yian Zhao and Wenyu Lv and Shangliang Xu and Jinman Wei and Guanzhong Wang and Qingqing Dang and Yi Liu and Jie Chen},
year={2023},
eprint={2304.08069},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
模型卡作者
🔧 技術細節
文檔未提及足夠詳細的技術實現細節(未超過50字),跳過該章節。
📄 許可證
本模型採用Apache-2.0許可證。