🚀 Poseless-3B
このプロジェクトは、VLMを用いた新しいロボットハンド制御フレームワークを提供します。ポーズ推定を省略して、単眼画像から直接関節角度を推定することができ、実世界のシナリオや人間の手の動きの模倣にも対応しています。
🚀 クイックスタート
このモデルを使用するには、以下の手順に従ってください。
import torch
from PIL import Image
from transformers import AutoProcessor, Qwen2_5_VLForConditionalGeneration
from qwen_vl_utils import process_vision_info
device = "cuda" if torch.cuda.is_available() else "cpu"
model_path = "homebrewltd/Poseless-3B"
model = Qwen2_5_VLForConditionalGeneration.from_pretrained(
model_path,
trust_remote_code=True,
torch_dtype=torch.bfloat16
).eval().to(device)
processor = AutoProcessor.from_pretrained(
model_path,
min_pixels=256*28*28,
max_pixels=1280*28*28,
trust_remote_code=True
)
image = Image.open("your_hand_image.png").convert("RGB")
SYSTEM_PROMPT = """You are a specialized Vision Language Model designed to accurately estimate joint angles from hand pose images. Your task is to analyze images of a human or robotic hand and output precise angle measurements for each joint. Output joint angles in radians.
Output Format:
<lh_WRJ2>angle</lh_WRJ2><lh_WRJ1>angle</lh_WRJ1><lh_FFJ4>angle</lh_FFJ4><lh_FFJ3>angle</lh_FFJ3><lh_FFJ2>angle</lh_FFJ2><lh_FFJ1>angle</lh_FFJ1><lh_MFJ4>angle</lh_MFJ4><lh_MFJ3>angle</lh_MFJ3><lh_MFJ2>angle</lh_MFJ2><lh_MFJ1>angle</lh_MFJ1><lh_RFJ4>angle</lh_RFJ4><lh_RFJ3>angle</lh_RFJ3><lh_RFJ2>angle</lh_RFJ2><lh_RFJ1>angle</lh_RFJ1><lh_LFJ5>angle</lh_LFJ5><lh_LFJ4>angle</lh_LFJ4><lh_LFJ3>angle</lh_LFJ3><lh_LFJ2>angle</lh_LFJ2><lh_LFJ1>angle</lh_LFJ1><lh_THJ5>angle</lh_THJ5><lh_THJ4>angle</lh_THJ4><lh_THJ3>angle</lh_THJ3><lh_THJ2>angle</lh_THJ2><lh_THJ1>angle</lh_THJ1>
"""
messages = [
{"role": "system", "content": f"{SYSTEM_PROMPT}"},
{
"role": "user",
"content": [
{
"type": "image",
"image": image,
"min_pixels": 1003520,
"max_pixels": 1003520,
},
{"type": "text", "text": "<Pose>"},
],
},
]
text = processor.apply_chat_template(messages, tokenize=False, add_generation_prompt=True)
image_inputs, video_inputs = process_vision_info(messages)
inputs = processor(text=[text], images=image_inputs, videos=video_inputs, padding=True, return_tensors="pt").to(device)
generated_ids = model.generate(**inputs, max_new_tokens=1024)
generated_ids_trimmed = [out_ids[len(in_ids):] for in_ids, out_ids in zip(inputs.input_ids, generated_ids)]
output_text = processor.batch_decode(generated_ids_trimmed, skip_special_tokens=True, clean_up_tokenization_spaces=False)[0]
print(output_text)
出力はラジアンで表された関節角度のXML形式になります。
<lh_WRJ2>angle</lh_WRJ2><lh_WRJ1>angle</lh_WRJ1><lh_FFJ4>angle</lh_FFJ4>...
✨ 主な機能
新しいフレームワークの導入
VLM(例:Qwen 2.5 3B Instruct)を利用して、単眼画像から直接ロボットの関節角度をマッピングする新しいフレームワークを導入しました。これにより、ポーズ推定を完全に回避し、ロバストで形態学的に無関係な特徴抽出が可能になります。
合成データパイプライン
関節角度をランダム化し、視覚的特徴(照明、テクスチャなど)をドメインランダム化することで、無限のトレーニング例を生成する合成データパイプラインを導入しました。これにより、高価なラベル付きデータセットへの依存を排除し、実世界の変動に対するロバスト性を確保します。
クロスモルフォロジー汎化の実証
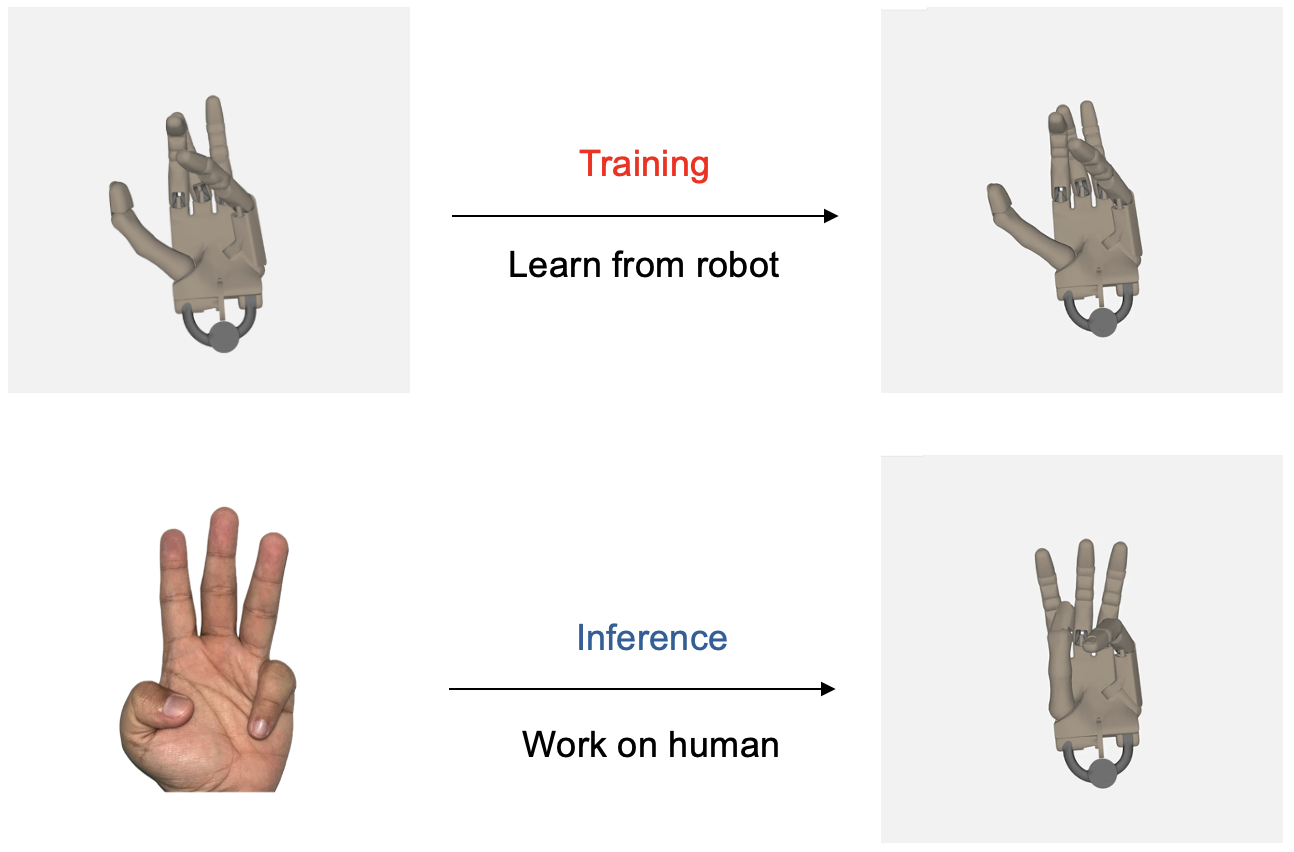
ロボットハンドのデータのみでトレーニングされたにも関わらず、人間の手の動きを模倣する能力を実証し、モデルのクロスモルフォロジー汎化能力を示しました。
深度フリー制御の可能性の実証
深度推定機能を持たないカメラでの制御が可能であることを実証し、ロボット工学研究で頻繁に使用される深度推定機能を持たないカメラでの後の採用に道を開きます。
📚 ドキュメント
論文紹介
"PoseLess: Depth-Free Vision-to-Joint Control via Direct Image Mapping with VLM" (論文リンク) は、VLMを用いた新しいロボットハンド制御フレームワークを紹介しています。このフレームワークは、投影表現を使用して2D画像を直接関節角度にマッピングすることで、明示的なポーズ推定を不要にします。
モデル詳細
📄 ライセンス
このモデルはApache-2.0 licenseの下で提供されています。
📚 引用
追加情報
詳細については、著者に alan@menlo.ai, bach@menlo.ai, charles@menlo.ai, yuuki@menlo.ai までお問い合わせください。
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
 Safetensors
Safetensors Transformers 複数言語対応
Transformers 複数言語対応